
Automatikkran
Entwicklung eines autonomen, hydraulisch gesteuerten Krans
für die Fa. Baljer & Zembrod (www.bz.ag)
Versuchs- / Entwicklungskran bei der Fa. Baljer & Zembrod

Artikel über den 1. Automatikkran beim Kunden (Veolia / Sarpi im Chemiepark in Marl)
PDF-Dokument [1.0 MB]
Forschungsprojekt
In diesem Zusammenhang wurde an einem Forschungsprojekt teilgenommen, in welchem die Fa. Baljer & Zembrod den hydraulischen Kran und die für die autonome Steuerung benötigte Hardware lieferte.
Meine Aufgabe war dabei den Kran so zu optimieren, damit dieser in der Lage war die von der Materialerkennung genannten Positionen, autonom anfahren zu können.
https://inv.nadeko.net/embed/uLJamBfZUpE?
Touchpanelseite zur Automatikkransteuerung
Für die Bedienung eines Krans wird bisher ein Kranbediener benötigt. Vor allem bei einfachen, in Mehrschichtbetrieb ausgeführten Materialumschlägen, wäre ein autonom arbeitender Kran
eine
große menschliche und finanzielle Entlastung.
Die Schwierigkeit einen Kran zu automatisieren, liegt zum einen an der Materialerkennung welches umgeschlagen werden soll und zum anderen an dem Arbeitsmedium des Krans, dem Hydrauliköl.
Beide Aspekte sind den Umwelteinflüssen und damit vielen Störquellen, wie z.B. Licht und
Temperatur ausgesetzt, welche es gilt mit einer intelligenten Hard-/ und Software zu kompensieren.
Die Software für das Verfahren und Positionieren des Krans, ist an eine konventionelle
Industrierobotersteuerung angelehnt. Bei Industrierobotern wird die Arbeitsleistung durch
elektrischer Energie gewonnen, welche deutlich einfacher geregelt werden kann, als es dies bei
Hydrauliköl der Fall ist.
Die Herausforderung ist nun die Technologie der bisher elektrisch betriebenen Industrieroboter, auf die seit langem am Markt etablierten und in unzähligen Anwendungsbereichen, Größen und
Stückzahlen zum Einsatz kommenden hydraulisch betriebenen Krane zu adaptieren.
Beispiel der Kennlinie eines Hydraulikventils
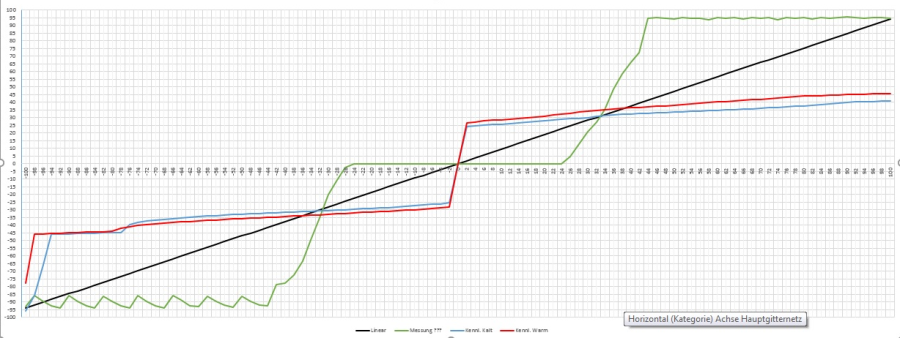
X-Achse: Öffnungsgrad [%];
Y-Achse: Volumenstrom bzw. Achsegeschwindigkeit [mm/s]
Grün: Istkennlinie
Schwarz: Sollkennline
Rot: Kompensierte Kennlinie